This ‘beest is the natural next step after his remote-controlled walker, which we featured a month or so ago. Like that one, the locomotion comes from a pair of micro gear motors that are controlled by an Arduino Nano over Bluetooth. The pyrotechnics begin when nitinol wire cleverly strung across two lever nuts is triggered. All the electronics are housed inside a 3D-printed box that [Jeremy] designed to sit in the middle of the legs. We love the face plate he added later in the build, because those gumdrop LED eyes are sweet.
Can you believe that this vehicle of destruction began as a pile of innocent, pasta-colored pieces of kit? We dig the camouflaged battleship paint job, ’cause it really toughens up the whole aesthetic. And really, that’s probably what you want if you’re driving around a spindly beast that can just shoot rockets whenever. Let’s light this candle after the break, shall we?
[Theo Jansen] has come up with an intriguing wind-powered strandbeest which races along the beach with surprising speed and grace. According to [Jansen], it “doesn’t have hinging joints like the classical strandbeests, so they don’t get sand in their joints and you don’t have to lubricate them.” It’s called UMINAMI, which appropriately means “ocean wave” in Japanese.
There are only videos of it in action to go on so far, but a lot can be gleaned from them. To make it easier to keep track of just a single leg, we’ve slowed things down and reddened one of them in the banner animation. Those legs seem to be providing a push but the forward motion is more likely supplied by the sails. The second video below shows it being pulled along by the type of strandbeest we’re all more used to seeing.
What follows is an analysis and best guess about how it works. Or you can just enjoy its graceful undulations in the videos below.
How is it all connected together? There are two sets of horizontal beams which span the length of the strandbeest around halfway down the height. These beams are fixed in length and seem to be for constraining the overall length. There are two sets of them, dividing the wave in the middle and possibly done that way to allow the two sections to tilt sideways independently of each other
From the views shown here, it’s clear that the legs are free to slide along those horizontal beams. Meanwhile, the beam along the top is longer but is also flexible, as are smaller segments in between the legs at the bottom. The top beam, however, keeps the tops of the legs evenly spaced apart whereas the smaller bottom segments only set a maximum distance between adjacent legs, while folding up to allow adjacent legs to touch. That’s why the legs come together only at the bottom of the wave.
What makes it undulate like a wave? Here’s our best guess from the videos and without experimenting. As the bottom of a leg catches in the sandy beach, it’s pulled along at the top by the sails, causing its top to pivot forward. While the leg is caught in the sand and is pulled along, it also pulls apart the legs in front of it while compressing the legs behind it. The compression has to exist because the first and last legs appear to be constrained by the middle horizontal beams, preventing all of the legs from being spaced apart at the same time. But that’s all just based on video analysis and could be wrong. What do you think? We’d love to hear your suggestions and even to see your own undulating strandbeests.
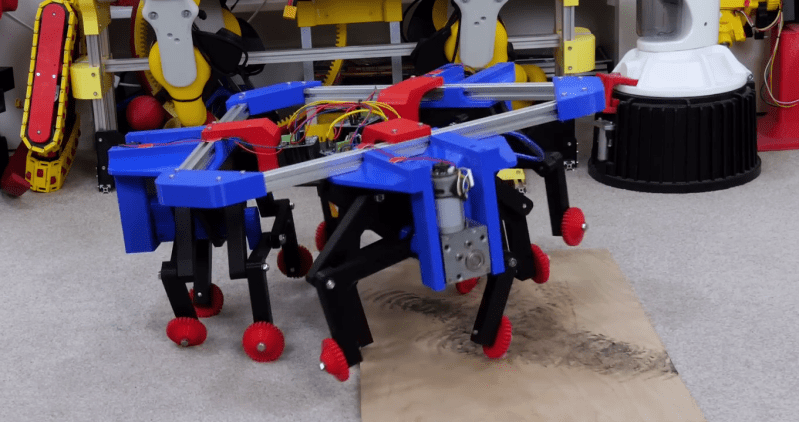
Father-and-son team [Wade] and [Ben Vagle] have developed and extensively tested two great walker designs: TrotBot and the brand-new Strider. But that’s not enough: their website details all of their hard-earned practical experience in simulating and building these critters, on scales ranging from LEGO-Technic to garage-filling (YouTube, embedded below). Their Walker ABC’s page alone is full of tremendously deep insight into the problem, and is a must-read.
These mechanisms were designed to be simpler than the Jansen linkage and smoother than the Klann. In particular, when they’re not taking a stroll down a beach, walker feet often need to clear obstacles, and the [Vagles’] designs lift the toes higher than other designs while also keeping the center of gravity moving at a constant rate and not requiring the feet to slip or slam into the ground. They do some clever things like adding toes to the bots to even out their gaits, and even provide a simulator in Python and in Scratch that’ll help you improve your own designs.
If you wanted a robot that simply moved, you’d use wheels. We like walkers because they look amazing. When we wrote [Wade] saying that one of Trotbot’s gaits looked animal-like, he pointed out that TrotBot got its working name from a horse-style gait (YouTube). Compared to TrotBot, the Strider family don’t have as much personality, but they run smoother, faster, and stronger. There’s already a 3D-printing-friendly TrotBot model out there. Who’s going to work something up for Strider?
Most readers will be familiar with the work of the Dutch artist Theo Jansen, whose Strandbeest wind-powered mechanical walking sculptures prowl the beaches of the Netherlands. The Jansen linkage provides a method of making machines with a curious but efficient walking gait from a rotational input, and has been enthusiastically copied on everything from desktop toys to bicycles.
One might think that a Jansen linkage would be beyond some materials, and you might be surprised to see a paper one. Step forward [Luis Craft] then, with a paper walking Strandbeest. Designed in Blender, cut on a desktop CNC paper cutter, and driven by a pair of small robots linked to an Arduino and controlled by a Bluetooth link, it has four sets of legs and can push around desktop items. We wouldn’t have thought it possible, but there it is.
He claims that it’s an origami Strandbeest, but we’re not so sure. We’re not papercraft experts here at Hackaday, but when we put on our pedantic hat, we insist that origami must be made of folded paper in the Japanese style rather than the cut-and-glue used here. This doesn’t detract from the quality of the work though, as you can see in the video below.
Walking robots have a rich history both on and off the storied pages of Hackaday, but if you will pardon the expression, theirs is not a field that’s standing still. It’s always pleasing to see new approaches to old problems, and the Landbeest built by [Dejan Ristic] is a great example.
It’s a four-legged walker with a gait dictated by a cam-and-follower mechanism that allows it to perform the full range of leg movement with only one motor. Each cam can control more than one leg in synchronisation, and in his most recent prototype, there are two such mechanisms that work on opposite corners of a four-legged machine. The legs are arranged in such a way that the two corner-to-corner pairs pivot at their centres in a similar manner to a pair of scissors; allowing a servo to steer the robot as it walks.
The result certainly isn’t as graceful as [Theo Janssen]’s Strandbeest, from which it evidently takes inspiration for its name, but it’s no less capable for it. After the break you can see a video he’s posted which clearly illustrates its operation and demonstrates its ability to traverse obstacles.
The only thing that’s missing are the files and software should you wish to create your own. He’s unapologetic about this, pointing out that he’d prefer to wait until he is satisfied with it before letting it go. Since he’s put a lot of work in so far and shows no sign of stopping, we’re sure he’ll reach that point soon enough.
Prolific maker [Jeremy Cook] recently put the finishing touches (at least, for now) on his impressive ClearCrawler remote controlled Strandbeest, which includes among other things a surprisingly expressive “head” complete with LED matrix eyes. For anyone in the audience who was only mildly terrified of these multi-legged robotic beasties before, you may want to avert your eyes from the video after the break.
The clever locomotive design of [Theo Jansen] known as Strandbeest is a legged walker. What makes it special is that the legs themselves are not independent, but work together for a gliding action more akin to wheeled bots. [Jeremy’s] work with ClearCrawler has taken this to another level of precision and mechanization.
Before installation of the electronics, the ClearCrawler had to be tethered to a bench power supply, and could only move forward and backward. Once the locomotion was working as expected, [Jeremy] was ready to install some brains into the beast.
The robot is controlled by a dual motor driver and an Arduino Nano socketed in an I/O expansion board. Communication between the Nano onboard the walker and the hand-held remote control is provided by of a pair of nRF24L01 modules. The controller itself is a simple affair, comprised of a joystick shield plugged into an Arduino Uno.
The robot’s head is made up of a chunk of clear polycarbonate tube with a 3D printed internal frame to hold the dual 8×8 LED matrices that serve as its animated eyes. This arrangement is mounted on a servo pan and tilt mount, which is controlled by an analog stick on the controller. While the head doesn’t currently serve any practical function, it does give [Jeremy] a chance to emote a bit with his creation; a popular trick when he shows the ClearCrawler off.
A few years ago we covered this robot’s predecessor, the considerably larger ClearWalker. While that machine was surely a beauty to behold, this smaller and more agile iteration of the concept is quite a bit more practical.
The first thing Jeremy Cook thought when he saw a video of Theo Jansen’s Strandbeest walking across the beach was how incredible the machine looked. His second thought was that there was no way he’d ever be able to build something like that himself. It’s a feeling that most of us have had at one time or another, especially when starting down a path we’ve never been on before.
But those doubts didn’t keep him from researching how the Strandbeest worked, or stop him from taking the first tentative steps towards building his own version. It certainly didn’t happen overnight. It didn’t happen over a month or even a year, either.
His first builds could barely move, and when they did, it wasn’t for long. But the latest version, which he demonstrated live in front of a packed audience at the LA College of Music, trotted across the stage with an almost otherworldly smoothness. To say that he’s gotten good at building these machines would be something of an understatement.
Jeremy’s talk is primarily focused on his Strandbeest creations, but it’s also a fascinating look at how a person can gradually move from inspiration to mastery through incremental improvements. He could have stopped after the first, second, or even third failure. But instead he persisted to the point he’s an expert at something he once believed was out of his reach.
Learning to Crawl
There’s a well known Chinese proverb that, roughly translated, states “a journey of a thousand miles begins with a single step.” It’s something to keep in mind any time you take on a challenge, but it rings especially true for anyone looking to build a Strandbeest. Rather than trying to tackle the entire machine at once, Jeremy thought a reasonable enough approach to constructing a multi-legged walking robot was to first build a single leg and understand how it operates.
One of the early wooden designs.
With one leg built and working, the next step was of course to build more of them. When he had four assembled, it was time to design a base to mount them on, and then outfit it with electric motors to get things moving.
Unfortunately this first Strandbeest, made of wood and roughly the size of a golf cart, never worked very well. Jeremy attributes its failure to a number of issues which he would eventually learn to solve, such as imprecision in the linkages, excessive friction, and undersized motors. That first build may have failed as a walker, but it served as a fantastic learning experience.
For the second Strandbeest Jeremy switched over to cutting the parts out of MDF, but the contraption was still too heavy. This version was even less successful than the first, and it soon fell apart. It seemed clear at this point that the way forward was to scale the design down to a more manageable size.
The Next Generation
Once he shrunk the walker’s design down to tabletop scale, Jeremy really started seeing some progress. It still took a few iterations to get something that could move around without jamming up or rattling itself to pieces, but with parts that could be accurately cut on a CNC router and the addition of a new geared drive system, these smaller Strandbeests really started to come alive.
Smaller, gear-driven, walkers proved successful
Not only did they perform much better, but the eventual switch to clear acrylic gave them a very distinctive look. Around this time, Jeremy also started to add some anthropomorphic features, like articulated “heads” that housed cameras or LED “eyes”. These features not only gave his bots the ability to emote, but also marked a clear separation between his creations and that of Theo Jansen, who’s designs were only getting larger and more alien as time went on.
The latest and greatest of these acrylic Strandbeests is the ClearCrawler, which takes into account all the lessons Jeremy has learned over the years. Powered by an Arduino Nano and controllable via a custom handheld remote using nRF24L01 modules, this walker is easily expandable and provides an excellent platform for further research and exploration.
Staying Humble
Despite the leaps and bounds that Jeremy has made with his Strandbeests, he still remains in awe of the original wind-powered walkers that Theo Jansen unveiled all those years ago. If anything, he says he has more respect for those creations now than when he first saw them. Looking at it with no knowledge of how it works, you’ll of course be impressed. But once you understand the mechanisms involved, and just how hard it is to build and operate these creations, you realize what a monumental accomplishment it really was.
Which is perhaps the real lesson to be learned after watching Jeremy’s talk: there’s always more to learn and be impressed by. Even if you’ve been working on a particular project for years and now are at the point where you’re giving presentations on it at a hardware hacking conference, don’t be surprised if you still find yourself scratching your head from time to time. Rather than being discouraged, use the experience as inspiration to keep pushing forward and learning more.
Multiple rows of intricately articulated legs are the defining characteristic of the Strandbeest, but [James Bruton] wondered if he could reduce that down to a single row using the same principles at work in a self-balancing two wheeled robot. While it’s perhaps a bit early to call his experiments a complete success, the first tentative steps taken by his (relatively) svelte Strandbeest certainly look promising.
Initially the robot only had two pairs of legs, but in testing [James] found this arrangement to be a bit unstable. By bringing the total count to four legs per side and improving the counterweight arrangement, the bot has been able to walk the length of the workshop. Unfortunately, an issue with the leg design seems to be preventing the Strandbeest from taking any backward steps.
Normally this wouldn’t be that big of a problem, but in this case it’s keeping the Strandbeest from being able to self-balance while standing still. In other words, the robot needs to keep moving forward or it will fall over. Still, [James] thinks the idea has promise and wants to continue experimenting with the bot in a larger area.
Specifically, he wants to see if the dual-motor robot can turn by varying the speed the two sets of legs are running at. If it can walk in a tight enough circle, it could keep right on marching until the power runs down. Sounds more than a little nightmarish to us, but we’d still like to see it.
Reader’s may recall [James] from this other another robotic projects, such as the phenomenal OpenDog. We don’t know where his obsession of legged robots comes from, but we certainly aren’t complaining.
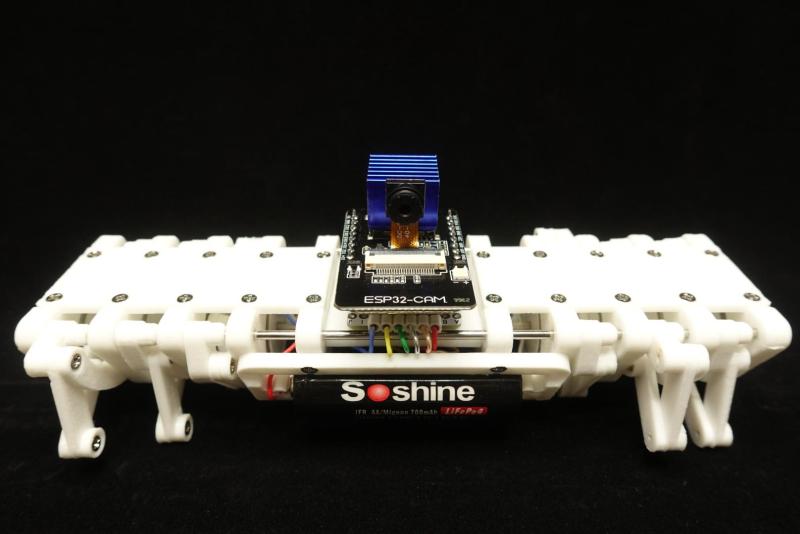
Wheels might be the simplest method of locomotion for robots, but walkers are infinitely more satisfying to watch. This is certainly the case for [Chen Liang’s] tiny Strider walker controlled by a ESP32 camera board.
The Strider mechanism might look similar to Strandbeest walkers, but it lifts its feet higher, allowing it to traverse rougher terrain. [Chen]’s little 3D printed version is driven by a pair of geared N20 motors, with three legs on each side. The ESP32 camera board allows for control and an FPV video feed using WiFi, with power coming from a 14500 LiFePO4 battery. The width required by the motors, leg mechanisms, and bearings means the robot is quite wide, to the point that it could get stuck on something that’s outside the camera’s field of view. [Chen] is working to make it narrower by using continuous rotation servos and a wire drive shaft.
We’ve seen no shortage or riffs on the many-legged walkers, like the TrotBot and Strider mechanism developed by [Wade] and [Ben Vagle], and their website is an excellent resource for prospective builders.
The steampunk aesthetic can take on many forms, and while pipes, valves, and boilers can look great, having complicated machinery with lots of moving parts really makes your project shine. A team of steampunk enthusiasts over at Tampere Hacklab did this by building a vehicle named Maakrapu. It’s a two-wheeled buggy that looks like it’s being pulled forward by some kind of five-legged creature. The extremely smooth motion of its legs conjures up images of lobsters or crabs (“Maakrapu” means “land crab” in Finnish), and is also reminiscent of Theo Jansen’s Strandbeesten.
The wooden legs are linked together with a metal crankshaft, which was welded together from plasma-cut parts. A steering wheel is included to orient the legs in the direction of travel, although the actual steering of the vehicle is done through differential braking. An earlier version had no propulsion and was meant for downhill riding only, but this latest model comes with an electric motor and a battery, making it actually somewhat useful as an urban runabout.
The video embedded below shows the design of the Maakrapu as well as a long drive from the center of Tampere back to the Hacklab. If you like vehicles with lots of little moving legs like this, check out the Strandbeest Bicycle. For a more literal “steam”-punk experience, try this steam-powered bike.
[James Bruton] is on a quest to explore all the weird and wonderful methods of robot locomotion, and in his latest project created an omnidirectional walker that can move in any direction instantaneously.
The walker actually makes use of three independent four-legged Strider mechanisms, connected in a triangle at 120deg. Wheels are attached to the bottom of each leg, oriented at a right angle to the leg’s plane of motion to allow the foot to slide. Varying the relative speed and direction of each of the mechanisms lets the robot move in any direction, similar to his ball-wheeled robot. Each strider mechanism uses a single motor and looks similar to Strandbeest walkers, but it lifts its feet to traverse rougher terrain. [James] demonstrates this with some obstacles, and found that moving in such an orientation that all three sets of legs provide the best results.
[James] planes to build a larger rideable version, but we think he should mount a chest of Sapient Pearwood to carry all his stuff and name it The Luggage.
Once you’ve seen a strandbeest, it’s hard to forget the mesmerizing movement of its mechanical limbs. [Adam Savage] built a pedal-powered strandbeest in (more than) one day in full view of the public at the San Francisco Exploratorium.
One of the biggest challenges with building strandbeests is the sheer number of parts required to build a walking machine. It becomes clear rather quickly how big of an advantage the wheel is for part count on a device. Add in a few seemingly small design errors, and you might not have any forward motion at all.
[Savage]’s build takes us through all the ups and downs of this process, including lots of wrenching, welding, and more sneakers than Squitter the Spider could wear. The final product is unwieldy, impractical, and beautiful. What more could a maker ask for?
Unlike so many other builds today, this one features some good old fashioned craft techniques. The build uses popsicle sticks for the legs, what appear to be toothpicks for the joints, and a cardboard box for the main body. A small brushed DC motor is used for propulsion to keep things easy, which runs off a few AA batteries. It’s a gearmotor, which gives it plenty of torque to propel the walking mechanism without undue strain.
It may not be powered by nature, and it may not be taller than most humans, but it’s still got an appealing gait and it still inspires us with its design. If you want to learn more, go ahead and take a gander at [Theo Jansen’s] own designs and see what you can pick up. Video after the break.
For getting around on most surfaces, it’s hard to beat the utility of the wheel. Versatile, inexpensive, and able to be made from a wide array of materials has led to this being a cornerstone technology for the past ten thousand years or so. But with that much history it can seem a little bit played out. To change up the locomotion game, you might want to consider using robotic legs instead. That’s what [Giliam] designed into this mobile coffee table which uses custom linkages to move its legs and get itself from place to place around the living room.
The process to build this mobile coffee table started years ago, when [Giliam] was designing walking mechanisms in software. A genetic algorithm was used to develop improved versions of various mechanisms, with the best ones going on to develop successive generations of the designs. Originally this just started out as a software project, but [Giliam] also developed some woodworking skills in the meantime which led to the actual construction of this coffee table.
From there the design was moved to Fusion 360, where it could then be sent to a CNC machine to create all of the parts for the 12-legged table. An Arduino Nano controls the leg movements, with power to the legs’ crankshafts provided by 24 V brushless motors. Finally, a Bluetooth module is included to allow the table to receive commands from a modified Nintendo Wii “Nunchuk” — itself an impressive project that we covered back in 2020.
This project took an incredible amount of work not just to design the leg mechanisms but CNC machine them out of bamboo, glue everything together, and finish it into what would be an excellent example of woodworking even without the capability of moving the table from the wall to the middle of the room and back as needed. We can’t really say we’ve seen a mobile coffee table before either, wheeled or otherwise, but if you need the tabletop instead to rotate and position itself at arbitrary angles we have seen one which was designed to be used for metalworking.
The Strandbeest is a walking machine, a creation of the celebrated artist Theo Jansen. They can look intimidating in their complexity, but it’s quite possible to build your own. In fact, if you’ve got a 3D-printer, it can be remarkably straightforward, as [Maker 101] demonstrates.
The build relies on an Arduino Uno as the brains. It’s equipped with an L293D motor driver shield to run two DC gear motors which drive the walking assemblies. Power is courtesy of a 3-cell lithium-polymer battery. The chassis, legs, and joints are all 3D-printed, and rather attractively in complimentary colors, we might add.
Controlling this little Strandbeest is simple. [Maker 101] gave the Arduino an infrared sensor which can pick up signals from a simple IR remote control. It can be driven backwards and forwards or turned left and right. What’s more, it looks particularly elegant as it walks—a hallmark of a good Strandbeest design.